【水上水下一体化测量应用落地】
【一体化测量】无人一体化测量项目应用落地,项目成功验收
海岸带作为连接陆地和海洋的特殊地带,与人类生产生活息息相关,海岸带区域测量一直是海洋测绘领域的重要工作内容。水陆一体化测量因对水陆区域进行一体化无缝测量,通过统一测量坐标,避免了由于水上、水下分开测量造成的地形拼接问题,且工作效率和测量精度能够达到相应规范的要求,成为近年来的一项新技术,也成为海岸带一体化测量的利器。目前,国内外已对水陆一体化测量进行了一定的研究和报道。随着无人艇、无人机等先进测绘平台的逐步深入应用,无人艇作为水陆一体化系统的运动载体将是水陆一体化海洋测量的一个研究开发方向。无人艇与水陆一体化测量技术的结合无疑给水陆一体化测绘带来全新的作业模式,在提高测量作业效率、降低作业人员危险程度有着积极的作用。无人艇载水陆一体化系统采用了先进的无控点测量和智能无人艇技术,是船载水陆一体化系统和无人艇的兼容性集成。为了保证航向和姿态的统一,无人艇和测量设备共用定位和姿态等辅助设备。系统作业时可分为两个主要操作:无人艇测线自动导航和水上激光、水下多波束点云实时采集。无人艇测线自动导航的基本原理是在定位定向系统引导下,无人艇高精度跟踪事先规划好的测线。
海陆一体化无人测量系统采用无控点快速测量技术,将多波束测深声呐、三维激光扫描仪、IMU/GNSS(含RTK功能)定位定向系统等众多传感器基于水面自主无人艇平台进行集成作业,实现了潮间带区域海陆地形快速移动智能化测量,为海岛(礁),海岸带,江河、湖泊和水库,港口(码头)以及水中建(构)筑物等对象的地理信息获取提供了突破性的技术手段,可广泛应用于海洋工程、海洋测绘、海洋调查等多个领域。

多波束测深声呐是水声技术、计算机技术、导航定位技术和数字化传感器技术等多种技术高度集成的产品。测深时,载有多波束测深声呐的船,每发射一个声脉冲,不仅可以获得船下方的垂直深度,而且可以同时获得与船的航迹相垂直的面内的几十个水深值。多波束测深声呐同单个宽波束的回声测深仪相比,具有横向覆盖范围大(为深度的几倍),波束窄(约为 3°~5°),效率高等优点。适用于海上工程施工区和重要航道的较大面积的精确测量,也可以用于精确测定航行障碍物的位置、深度。三维激光扫描技术又被称为实景复制技术,是测绘领域继GPS技术之后的一次技术革命,它突破了传统的单点测量方法,具有高效率、高精度的独特优势,三维激光扫描技术能够提供扫描物体表面的三维点云数据,因此可以用于获取高精度高分辨率的数字地形模型。

对于无人平台搭载作业,由于无人平台结构小、重量轻,执行测量时不稳定的测量环境更易造成仪器测量结果的不确定性。最主要体现在仪器对同一测量区域的整体测量偏差以及标准误差可能存在差异。因此需在有人船搭载的测量系统误差传递模型的基础上,进一步拓展构建无人平台无人化条件下的传递误差模型。将测深数据的不确定度信息(包括垂直不确定度和水平不确定度)与深度信息并列作为测深点的两种数据属性,从而利用密集测深数据的深度属性与不确定度属性进行测区内任意位置上某一节点的深度与不确定度估计,实现测量结果的质量控制。
海陆一体化同步采集设备包括多波束测深声呐、三维激光扫描仪和定位定姿一体机,三维激光扫描仪和多波束测深声呐产生的数据虽然都是点云数据,但两者的工作机理不同,三维激光扫描仪是逐点扫描方式,多波束测深声呐是逐线扫描方式。要实现最终的数据融合,必须解决不同采集频率、不同安装位置和不同类型的测量传感器在时间和空间上的同步,以及多传感器数据的时空对准。这部分工作从传感器选型、设备与船载平台的集成、多传感器的同步控制,以及多传感器的时间和空间协同方面均加以考虑。不但需要考虑不同设备的采集速度,还需要考虑设备的测量距离,以及与RTK记录频率的协调性,进行采频率的综合性能分析,最后才能选取最优的采样频率。此技术关系到数据采样的合理性和有效性,决定和影响着船载一体化测量技术的成败。
多传感器数据融合处理的前提条件是从每个传感器获得的信息必须是同一时刻和同一空间的描述,因此多传感器同步测量数据的融合也就需要对不同传感器的数据进行时间和空间的融合。为解决该问题,本系统拟在实现过程中利用时间数据融合技术和空间数据融合技术,首先选取一个传感器源数据的时间信息,建立基准的时间坐标系;然后因为各个传感器的采集频率不同,需要将各个传感器所采集的目标源数据在基准时间坐标上进行内插,让所有传感器的源数据都能在统一的时间坐标系上对齐。空间数据融合则是根据传感器之间的安装参数,通过统一高程基准和坐标系统(例如WGS-84),让各个传感器的源数据测量出的成像数据能在同一个坐标系下,显示真实的地形图像。
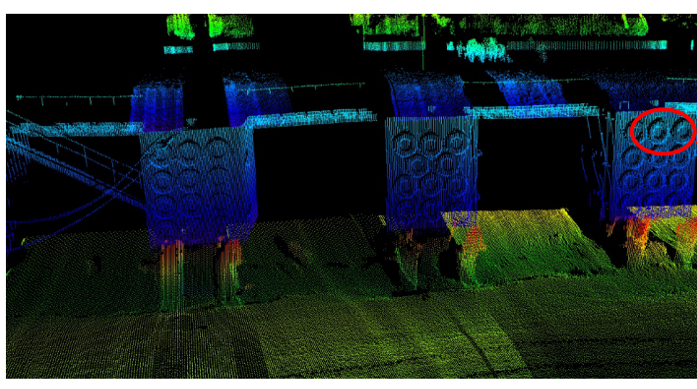
一体化测量成果: